-

- ARCHIVE
MV CIMF Festival

Henry Leung(Professor) l University of Calgary, CAN
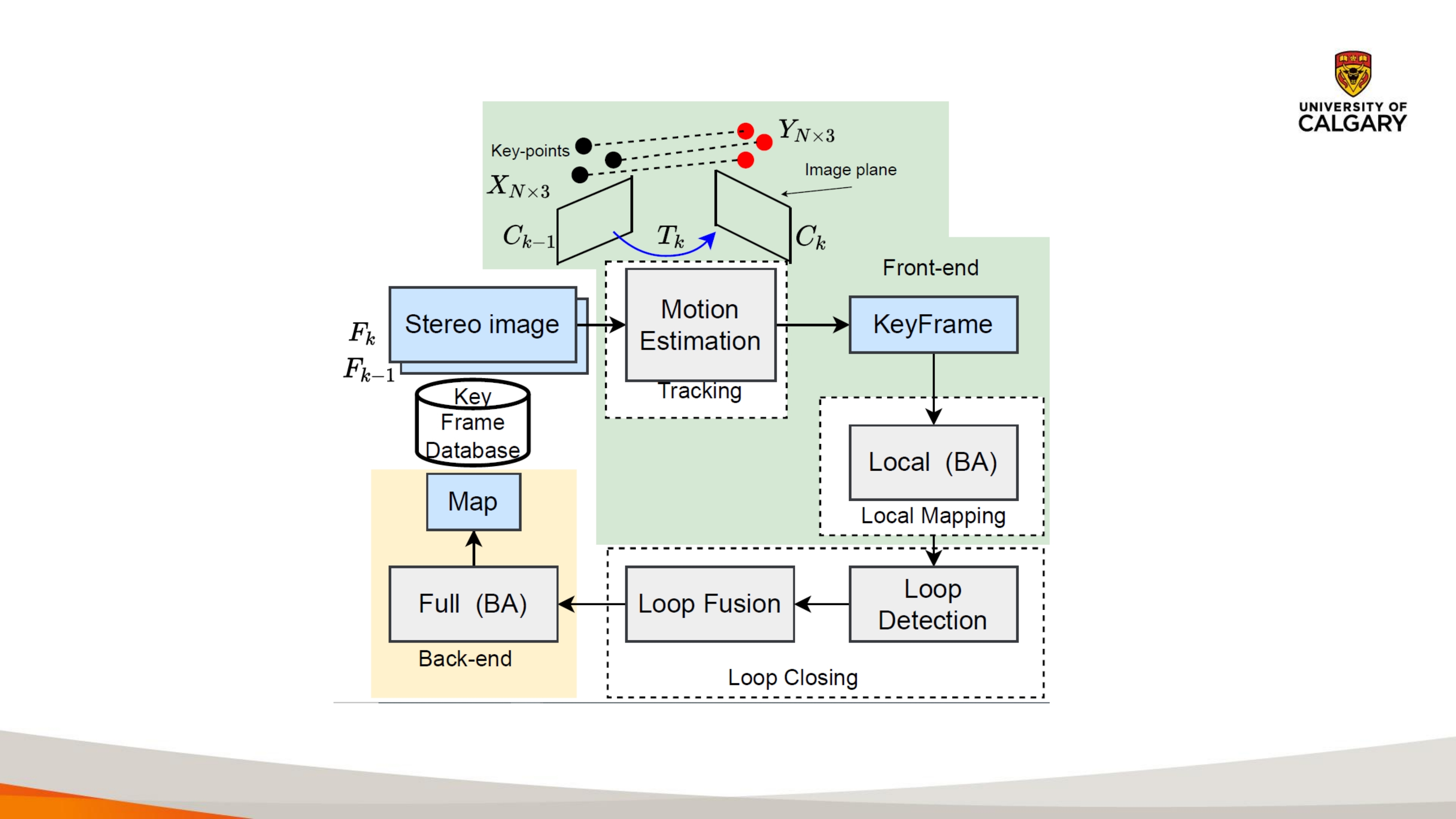
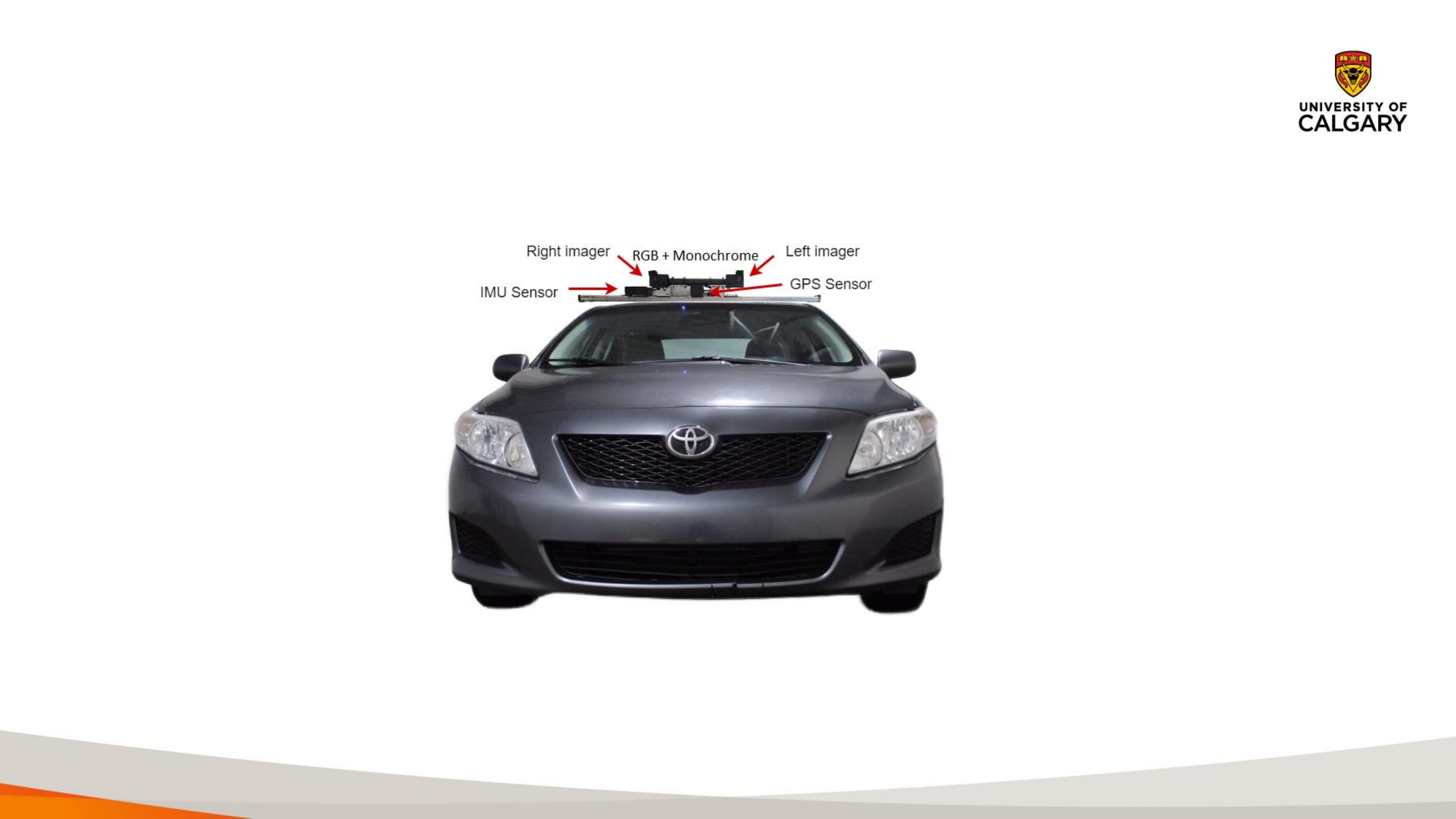
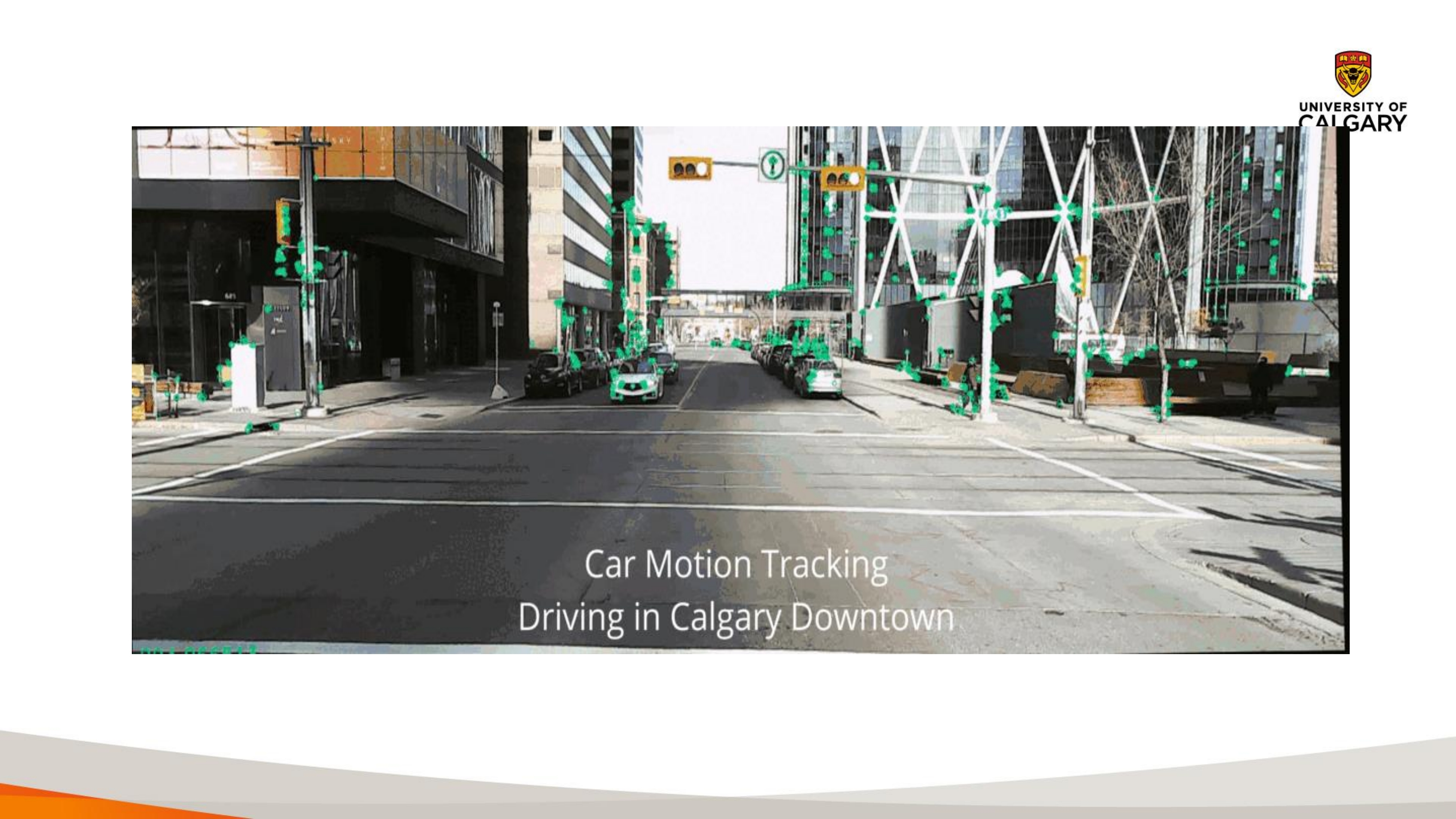
3D Perception for Autonomous Vehicles
Abstract
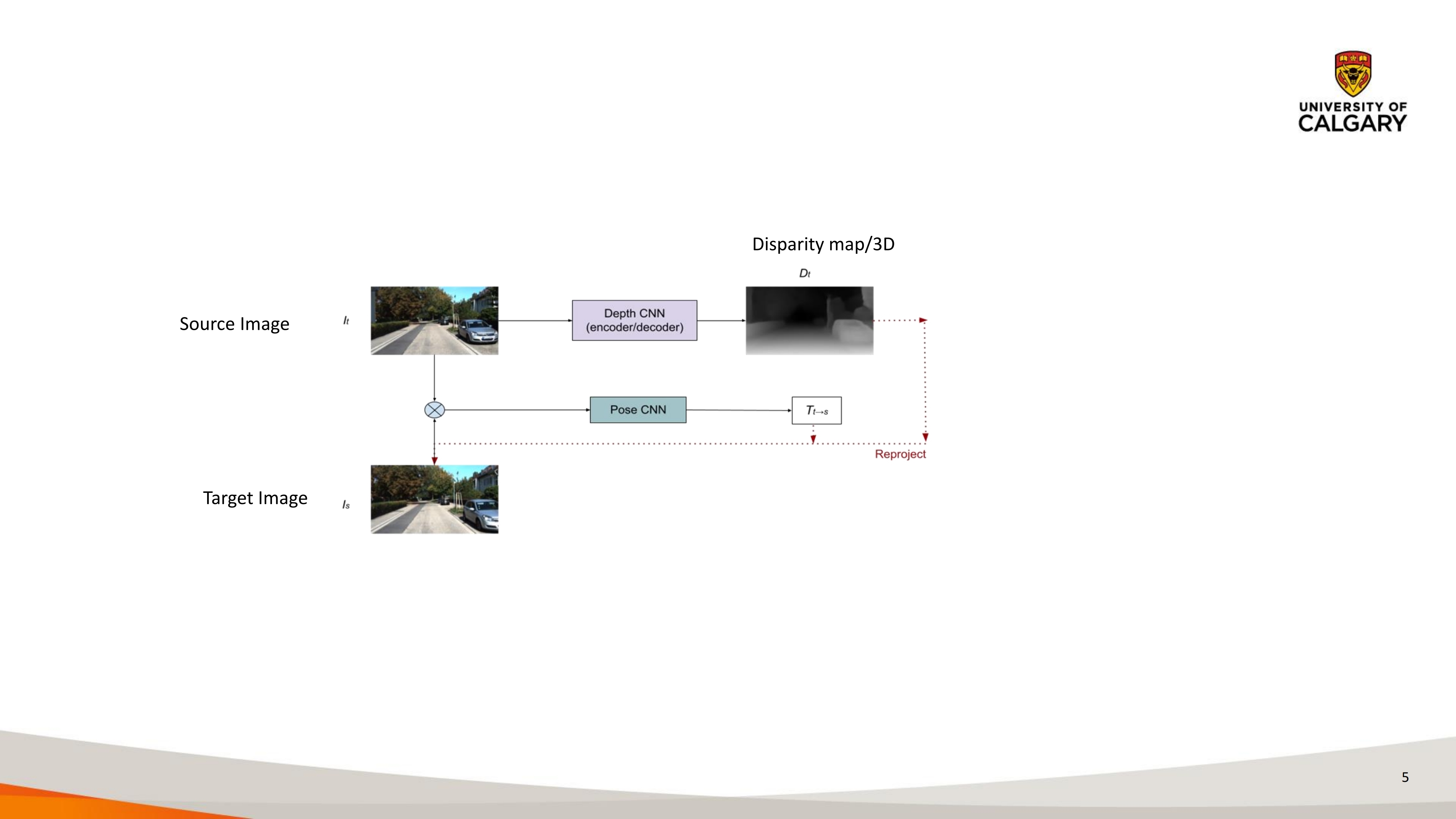
RGB-D for autonomous driving is challenging. in an outdoor environment, actual measurements are beyond the sensor range. partial or no depth information problem from the camera side is also amplified in outdoor use. short range and missing depth data. depth measurements at full range of the sensor are highly uncertain.
중앙대학교 가상융합대학원

06974 서울특별시 동작구 흑석로 84, 중앙대학교 305관 1001호
Tel. 02-881-7386 / E-mail. caumeta@gmail.com
@ GRADUATE SCHOOL OF METAVERSE CONVERGENCE. ALL RIGHTS RESERVED.